电子工程学院自主研发的系列智能机器人成果展
机器人智能搬运项目
项目简介:该项目模拟了工业自动化过程中自动化物流系统的实际工作过程。要求参赛者自行设计一个基于基于Openduino 或Stm32 控制器的小型移动码垛机器人,在比赛场地上,将不同颜色、形状或者材质的物体分类搬运码垛到不同的对应位置。比赛的记分根据机器人将物体放置的位置精度和完成时间来决定分值的高低。
对应课程:该项目设计过程中涉及到以下专业课程的知识和技能:单片机应用技术、传感器应用技术、电路基础、模、数电技术、控制技术等。


图1、2 现场紧张调试

图3 载誉而归
机器人智能导游项目
项目简介:该项目模拟导游工作者的实际工作过程。要求参赛者自行设计一个基于基于C51或Stm32 控制器的小型导游机器人,在比赛场地上,机器人根据裁判随机下达的城市,来规划自己的行走路线,并且要对停留的城市精准定位,并报出该城市的信息,对不作停留的城市不准停留,不读信息,否者扣分,比赛的记分根据机器人到达城市的精准度和速度以及播报信息的准确度来决定分值的高低。
对应课程:该项目设计过程中涉及到以下专业课程的知识和技能:单片机应用技术、传感器应用技术、电路基础、模、数电技术、控制技术、音频技术、射频技术等。

图4 教师赛前现场指导

图5 满载荣誉
四轴飞行机器人项目
项目简介:该机器人能够完成航拍、物质传递,如:包裹递送、抗洪抢险中救生圈的投递等功能。该机器人具有速度快、操作方便、功能多、价格便宜等优点,已经被广泛应用到各个领域。
对应课程:该项目设计过程中涉及到以下专业课程的知识和技能:单片机应用技术、传感器应用技术、电路基础、模、数电技术、控制技术、音频技术、遥控技术等。




图6 四轴飞行机器人试飞图片
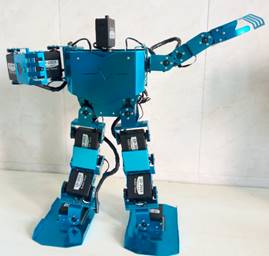
人型舞蹈机器人
项目简介:舞蹈机器人的设计可以基于不同硬件,我们设计的人型舞蹈机器人主控制器是基于Stm32芯片。在机器人的各活动关节配置有多达17个数字舵机,舵机具有高扭力、高转速、高稳定、反应灵敏、无抖动、转动角度大等优点,超快速高精度金属齿轮,耐冲击。人形机器人随音乐起舞、行走、起卧、武术表演、翻跟斗等高难度动作。机器人还配有PS2手柄,可控制机器人实现前进、后退、左转、右转和跳舞等功能。
对应课程:该项目设计过程中涉及到以下专业课程的知识和技能:单片机应用技术、嵌入式系统设计与开发、传感器应用技术、电路基础、模、数电技术、控制技术、音频技术、射频技术等。